~新机能实用化验证试验圆满完成 ~

日本精工株式会社(总部:东京都品川区、代表者:代表执行役社长 大塚纪男 以下简称NSK),得到神奈川县综合医疗康复中心的支持与配合,对实际使用环境中避障导航机器人进行了约半年的验证试验。该开发品以2013年11月“2013国际机器人展”的展品为基础,开发出导航功能,提高了 性及便利性。
为实现2016的实际投入使用的目标, NSK将充分利用本次验证试验的结果,致力于各种相关问题的解决。
NSK能自动识别并避开道路障碍物的车轮式移动机器人的成功开发,不仅旨在替代导盲犬、帮助高龄者等人行走,还力图成为在医院、办公楼、商业设施等无障碍移动的场所道路具有 功能的自动移动机器人。
当用户从事先登录的地方中选择想去的目的地,2013版机型可以根据地图信息及移动距离判断自己所处位置,同时识别障碍物,通过声音把用户带到目的地。其后,通过多次验证改良,新机型即便去首次访问的政府机构或医院等大型场所,也能够准确、便捷地到达目的地。
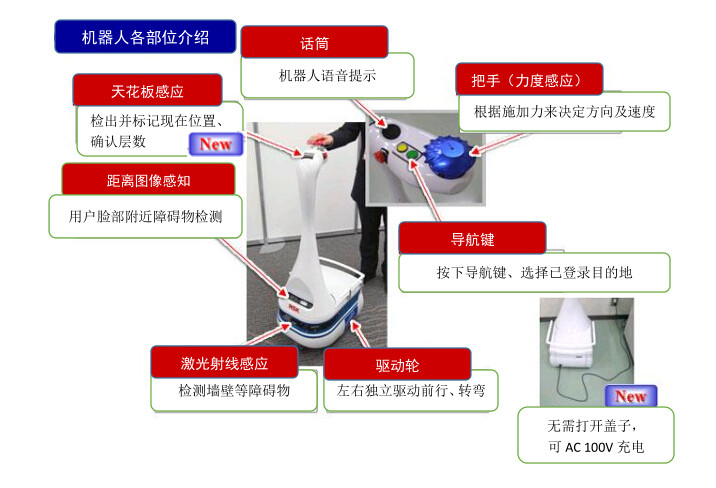
本开发品特点
(1) 强化导航功能
与原产品的用户需要通过机器人语音 ,才能控制把手使机器人避开障碍物,前往目的地的操作模式不同,新开发品可自动前往用户选定的目的地。该机器人会根据用户的握力改变行走速度,当用户松开把手时,机器人会 地停下。
(2) 提高使用便利性
针对原产品无法跨楼层使用导航功能的弱点,本次开发的新产品可识别每一层楼的天花板,确认其在哪一层楼,因此无论哪一层都能使用。另外,原产品在充电的时候,须把内部电池取出充电,新产品则无须取出电池即可充电,且电池续行时间提高了30%。
(3) 原功能的进一步检证改良
以前研发的以下功能,通过大量视力障碍患者的体验来验证其 性。而今后将针对其实用性进行改良。。
• 增加地面障碍物检知功能、用户头部障碍物回避功能
• 用语音来提示周围环境、进行道路导航
本开发品的未来用途
未来,将在无障碍医院等公共设施设置并使用该机器人,即便是陌生、易迷路的场所,视觉障碍患者也能 地到达目的地。并且,对医院等机构来说,该设备可减轻职员 工作的压力。